Sample Projects
Descriptions of sample projects are given below. Use these to select which project you would like to work on. All the projects are related to the general area of sensor technologies, which acts as a common, intellectual focus.
Once you have been admitted to the program, it is recommended that you contact the faculty member for additional information on any of these or other projects. Feel free to make arrangements with the faculty member prior to starting the SUNFEST program.
Distributed sensing and control of reconfigurable surfaces
Prof. Cynthia Sung (MEAM, CIS)
Email: crsung@seas.upenn.edu | Website
The goal of this work is to create lightweight, deployable morphing structures with integrated actuation and sensing by leveraging origami (folding)-inspired approaches to design and fabrication. Folding-based assembly enables all components to be fabricated as 2D sheets, allowing us to use existing, well-established, and scalable planar fabrication processes, resulting in structures that are cheap (often <$50 in electronics and <$5 in other materials), reliable (undergoing 10000s actuation cycles without failure), and self-reconfigurable (via embedded smart material actuators). Students working on the project will advance this technology by addressing (1) electronics and fabrication challenges associated with embedding a network of curvature sensors and actuators directly into the origami sheet and (2) control challenges associated with collecting and redistributing data from these distributed sensors and actuators. Current applications include jumping and hopping robots, as well as applications in autonomous flight and medical devices.
Engineering radiofrequency single-electron sensors for quantum information applications
Prof. Anthony Sigillito (ESE)
Email: asigilli@seas.upenn.edu | Website
The Sigillito lab is working to build a scalable quantum computer using single electrons trapped below nanoscale transistors in silicon. A key challenge in developing this technology is the need to detect the charge of single electrons very quickly (ideally in under 1 microsecond). One promising approach is to use radiofrequency resonant circuits that incorporate capacitances and inductances defined by the actual quantum device. The resonance frequency of these circuits can change with the addition of a single, mobile charge and can be detected by probing the phase or amplitude of a reflected RF tone. In this project, a student will design an LC resonator and test the performance at cryogenic temperatures (between 10 mK and 1.5K). Because semiconductor devices behave differently at cryogenic and room temperature, the student will need to characterize and screen components at low temperature to feed back into device simulations. Students will work with a graduate student to understand and design resonant circuits. The student will then test off-the-shelf components at cryogenic temperatures to develop tunable RF resonators suitable for probing quantum dot devices at millikelvin temperatures. Time permitting, the resonant circuit will be connected to an existing quantum dot device in the lab to test charge sensitivity in a real quantum processor.
Engineering Nontoxic Quantum Biosensors
Prof. Lee Bassett (ESE)
Email: lbassett@seas.upenn.edu | Website
Quantum mechanical systems are exquisitely sensitive to their environment. Usually this sensitivity prevents their use in biological applications, since thermal fluctuations and ambient noise can destroy quantum coherence. However, certain materials host optically active defects – so-called “impurity spins” – that exhibit quantum coherence at room-temperature and above, circumventing these limitations. The goal of this SUNFEST project is to investigate the properties of diamond nanoparticles functionalized with varied surface chemistries, towards the realization of new quantum-biochemical sensors. Nanodiamonds are inert and nontoxic, and their impurity spins respond to nanoscale magnetic and electrochemical fields through optical signals. The student will study the effects of different chemical and electrochemical environments on the nanoparticles’ optical response. In the process, they will gain varied experimental skills and work as part of an interdisciplinary team involving physicists, biochemists, and electrical engineers.
Exciton-Polariton gratings for colorimetric bio-molecular sensing
Prof. Deep Jariwala (ESE)
Email: dmj@seas.upenn.edu | Website
The objective of this project is to design nanophotonic structures in excitonic semiconductor films coupled to plasmonic or other semiconductor or epison near zero surfaces to induce narrow photonic modes that are strongly coupled to excitons. The excitonic semiconductor under question are atomically-thin transition metal dichalcogenides wherein the exciton binding energy and hence the resonance line are highly sensitive to surrounding dielectric environment. When coupled to photonic modes their sensitivity is further enhanced owing to the strong coupling between two or more oscillators and hence small change in dielectric environment either by adsorption of molecules or strain is expected to drive a large change in color visible to the naked eye as well as quantifiable via a hand held spectrometer. Students will develop skills for nanophotonic design using finite element solving softwares as well as get a change for hands on experimentation to observe color change and quantify change in reflection spectra.
Fabrication of transparent Ti3C2 titanium carbide electrodes for studying neural circuit dynamics
Prof. Flavia Vitale (Neurology)
Email: vitalef@pennmedicine.upenn.edu | Website
The development of devices to record and stimulate neural circuits has led to breakthrough discoveries on the connectivity and functionality of the brain in healthy and diseased states. Though great advances have been made in implantable electrode technology, there still exists a significant trade-off between achieving high spatial resolution and scaling the devices up to monitor large brain areas. Optical recording techniques, which rely on calcium or voltage-sensitive fluorescent reporters, offer the ability to monitor thousands of individual neurons simultaneously. However, these techniques do not offer the temporal resolution necessary to decode the firing patterns of neural circuits. The combination of high temporal resolution electrophysiology recording with high spatial resolution optical recording offers the potential to study neural networks in unprecedented ways and greatly enhance neuroscience research.
The Vitale Lab is pioneering the development of neural electrode technology based on Ti3C2 titanium carbide, a recently discovered 2D nanomaterial (a.k.a. MXene) (1) with unprecedented combination of optical and electronic properties. This project will involve optimizing processing parameters including MXene solution concentration and thin-film casting procedures to create devices with a high degree of optical transparency and electrical conductivity, as our current devices are optically opaque. The student will be trained the electrode fabrication process at the Penn’s Quattrone Nanofabrication facility and will learn the basis of electrical, electrochemical and optical measurements to characterize the optical transparency, conductivity, and interface impedance of MXene films under different processing conditions. This project is intended for a student interested in learning more about neuroengineering, materials science and microfabrication.
Implantable wireless touch sensors for neural prosthetics
Prof. Andrew Richardson (Neurosurgery)
Email: andrew.richardson@pennmedicine.upenn.edu | Website
We are developing an implantable tactile sensor that can detect forces acting on the skin and convey these signals wirelessly to a neural prosthetic device that restores the sense of touch disrupted by injury or disease. Students will research novel sensor strategies suitable for implantable devices. Typical research activities include: (1) characterizing subdermal physical and physiological markers of tactile forces, (2) designing sensors for these markers, (3) mechanical testing of sensor prototypes, (4) testing wireless data and power transmission for the implantable device, and (5) refining algorithms for encoding sensor output in the brain.
Instant Gratification for Heterogeneous SoC Development
Prof. Andre DeHon (ESE, CIS)
Email: andre@seas.upenn.edu | Website
We want to make programming today’s heterogeneous System-on-a-Chip designs (combining FPGA logic, embedded processors, and GPUs) as easy and as accessible as programming processors. Unfortunately, the current state-of-the-art is plagued by hour-long compile times for FPGAs (contrast with seconds for processors) that create a long edit-compile-debug loop that makes development less agile and disincentivizing the use and experimentation with these heterogeneous SoCs. Building on and extending emerging open-source tools, we are developing strategies to rapidly compile custom accelerators to these powerful platforms, including single-source compilation to processors and FPGAs, separate compilation and linkage, and quality-time tradeoffs. Within this agenda, there are many opporutnities for students to explore potential component tools and architectures to help realize the vision. The student will learn about modern SoC architecture and key techniques in the compilation and CAD for modern computing systems, experimental algorithm development and tuning, and software engineering.
Inverse Design for Sensing Applications
Prof. Nader Engheta (BE, ESE, MSE)
Email: engheta@ee.upenn.edu | Website
Optical Inverse Design is a numerical technique for designing structures with interesting optical properties. In traditional methods, the designer brings a combination of experience, intuition, and previous designs to bear on the problem. Typically, a handful of design parameters would then be tweaked to achieve the desired results. If the results are not achievable by varying these parameters, then the designer must guess a completely new design with new free parameters. In contrast, Inverse Design can create completely novel and surprising structures that are highly unintuitive. The student will design a sensitive optical sensor which would interrogate a subwavelength structure at a defined location at multiple wavelengths and polarizations in order to differentiate between one of several similar structures. The student will gain an understanding of optical simulation techniques, signal processing, and practical optics.
Harvesting Electrical Signals from Mechanical Stimuli using Nanoporous Metal-Based Sensors and Actuators
Prof. Eric Detsi (MSE)
Email: detsi@seas.upenn.edu | Website
Nanoporous metals and their composites represent an emerging class of inorganic materials for sensing and actuation applications. The sensing and actuation mechanism in these nanoporous metals is based on their electronic charge-induced strain property. Typically, modifying the density of free electrons at the interface of a high-surface-to-volume ratio nanoporous metal gives rise to changes in the surface stress of these materials. Due to the high-surface-to-volume ratio of nanoporous metals, changes in the surface stress induces in turn detectable macroscopic reversible strains of the order of 0.1% (or higher) in the bulk of the nanoporous metal. Recently we took advantage of this concept to develop a relative humidity sensor using nanoporous Au films with high surface-to-volume ratios (see Figure 1a). This nanoporous Au-based mechanical humidity sensor was able to generate large displacements in response to changes in relative humidity as shown in Figure 1b. In addition, we have also developed an ultrasmart electrochromic composite actuator made of polyaniline (PANI) grown into the pores of nanoporous Au, which was able to undergo both dimensional changes and changes in color simultaneously as illustrated in Figure 1c. A video showing these simultaneous changes in dimension and in color is available online on the following link: https://youtu.be/yQjPHs71GLs. So far, research effort in the field of nanoporous metal-based sensors and actuators focus on the conversion of electrical energy into mechanical work. The reverse process (mechanical-to-electric energy conversion) has rarely been explored in nanoporous metals. This research is therefore aimed at harvesting electrical signals from mechanical deformations in nanoporous metal-based sensors and actuators.
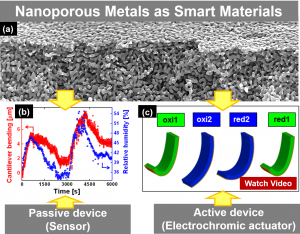
Figure 1. (a) Monolithic nanoporous Au
(b) Nanoporous Au used as passive humidity sensor/actuator (c) Monolithic nanoporous Au/PANI composite used as active electrochromic actuator. [3] (Online supporting Video available on the following link: https://youtu.be/yQjPHs71GLs.
Low profile, high precision torque sensor for robot arm feedback control and characterization
Prof. Mark Yim (MEAM, CIS, ESE)
Email: yim@seas.upenn.edu | Website
This project on sensor-based robotic mechanisms involves the creation of novel mechanical components to robotic systems for flying robots, truss-based robots, ice-based robots, or floating robots, for locomotion and/or manipulation. The integration of sensors is critical in implementing control for stability and accurate motion. This project has many potential directions depending on student interest but will likely include considerations for form-factor, cost, accuracy, and speed of the sensing element.
Microfluidic systems for point of care diagnostics and high throughput processing
Prof. Haim Bau (MEAM)
Email: bau@seas.upenn.edu | Website
The Bau lab is engaged in miniaturizing and automating clinical laboratory procedures to enable sophisticated medical diagnostics in resource poor settings, in the clinic, and at home (lab on a chip) and for genotyping (chip in the lab). Our research is interdisciplinary combining transport processes, biology, manufacturing, and mechatronics. Over the years, the Bau lab has engaged a few undergraduate students who participated in various aspects of our research, ranging from design with solid works, 3D printing, developing devices in which fluids are driven by capillary forces, and testing devices. Topics of particular interest in summer 2023 are the interfacing of portable devices with smart phones and/or detecting two fluorescent signals test and control (with different Stokes shifts) excited with a single diode in a single pot.
Microsensor-Based Assessment of Mitochondrial Disease
Prof. Mark Allen (ESE)
Email: mallen@seas.upenn.edu | Website
Primary mitochondrial diseases (PMDs) are multi-systemic disorders that collectively affect at least 1 in 4,300 individuals across all age groups. Currently, PMDs are diagnosed by muscle biopsy which is an invasive process. PMDs can be diagnosed using mitochondrial oxidative phosphorylation (OXPHOS) capacity, which directly depends on the availability of O2. Currently, no clinical or commercial methods to directly and precisely quantify in vivo muscle OXPHOS capacity exist. Recognizing the need to develop novel, improved devices that are minimally invasive for in vivo mitochondrial disease physiologic diagnosis and monitoring, we are developing microfabricated oxygen sensors to directly quantify skeletal muscle tissue oxygen (O2) levels. This project involves fabrication, optimization and validation of the miniaturized sensors in animal and human models. This project also involves development of sensors for other parameters such as pH, lactate and hydrogen peroxide in addition to oxygen, to enhance the clinical interpretation of key mitochondrial functions.
Molecular Diagnostics for Alzheimer’s Disease
Prof. Jina Ko (Pathology and Laboratory Medicine and Bioengineering)
Email: jina.ko@pennmedicine.upenn.edu | Website
We are developing a microtechnology that can detect early signatures of Alzheimer’s Disease (AD). This molecular diagnostics will combine microfabrication, assay development, and microscopy to achieve sensitive measurements of AD biomarkers from the blood. Students will learn interdisciplinary approaches to develop liquid biopsy based diagnostics, including extracellular vesicle isolation and detection, micro and nano-fabrication, microscopy, and image/data analysis.
Robots for River and Ocean Monitoring
Prof. M. Ani Hsieh (MEAM)
Email: m.hsieh@seas.upenn.edu | Website
Robots are critical tools in the stewardship of our water resources. Our research focuses on developing new robotic algorithms and platforms for robots to better sample and monitor marine environments. In particular, we focus on developing mapping, estimation, and control strategies that allow robots to harness the environmental dynamics for motion, planning, control, and coordination. Our strategies result in more energy efficient navigation strategies for marine vehicles and improved environmental models needed for water quality assessment and flow prediction. In our work, we synthesize ideas from robotics, nonlinear dynamics, and fluid dynamics in our design of planning, control, and coordination strategies for single and teams of robots. We experimentally validate our systems using our indoor multi-robot flow tank facilities and on the Schuylkill River using our autonomous boats.
Safe autonomous robots in the wild
Prof. George Pappas (ESE, CIS, MEAM)
Email: pappasg@seas.upenn.edu | Website
Our research strives to provide safety guarantees for autonomous systems operating in unknown environments. This is accomplished by developing novel methods for semantic mapping of unknown environments (Semantic SLAM) followed by safe planning in learned environments. Our software tools leads to higher assurance autonomy that provide guarantees that integrated control loops, reasoning, and deep learning perception. Experiments can take place in the Pennovation Center described in the Facilities Section of the proposal.
Sensor for Slip Detection in Robotics
Prof. Kevin Turner (MEAM, MSE)
Email: kturner@seas.upenn.edu | Website
The ability to detect the onset of slip is crucial for the gripping and manipulation of objects via robotic systems. While force and tactile sensors are widely deployed in robotic grippers, effective sensors for slip detection have yet to be realized. The objective of this project is to design, fabricate, and test a thin-film capacitive slip detection sensor. Sensor design will be accomplished via a combination of analytical and finite element modeling. The sensors will be fabricated via a combination of screen printing, microfabrication techniques, and polymer molding. The fabricated sensors will be tested to calibrate the sensors and validate their performance. If time permits, the sensors will be integrated into a robotic gripper, and demonstration experiments will be performed.
Sensorized Play
Prof. Michelle Johnson (Physical Medicine and Rehabilitation)
Email: johnmic@pennmedicine.upenn.edu | Website
There is a need for the development of sensorized toys that can allow researchers to measure kinematic and dynamic interactions during infant play. The goal of this project is to investigate the development of such sensorized toys that are invisible in that they do not interfere with the process of play therapy.
Sensors for Microrobotic Systems
Prof. Mark Miskin (ESE)
Email: mmiskin@seas.upenn.edu | Website
This research project aims to build integrated sensors/actuators for microrobotic systems. Our lab has been developing actuator technologies specialized to sub 100um robots. In particular, we have found that electrochemically induced surface stresses can be used to build powerful, low-voltage actuators that can interface with electronics and have used these mechanisms to build cell-sized walking robots. Yet one of the key limitations of our current technology is its inability to sense as well as create forces. Recent experiments on macro-scale actuators have demonstrated a way forward: some electrochemical actuators exhibit “a pseudo-piezoelectric effect,” allowing both sensing and actuation. This project will apply these concepts at the microscale. Using atomic layer deposition, we will construct nanometer thick actuators made from promising actuator/sensor materials including palladium and nickel. In principle, these devices will be able to both induce and sense mechanical forces via charge transfer to a surrounding electrolyte. Students will fabricate prototype actuators, with assistance from a supervising graduate student, and perform characterization of its force-to-charge coupling. If successful, this project will enable microrobots capable of performing closed-loop control, both sensing and manipulating their world through a single, ultra- miniaturized system.
Soft bioelectronic sensors and stimulators for peripheral nerves
Prof. Yuanwen Jiang (MSE)
Email: ywjiang@seas.upenn.edu | Website
Over the past decade, with the rapid development of flexible electronics, significant progress of neurotechnology has been made, especially on devices interfacing with the central nervous system. We are now able to track thousands of neurons at the same time over a time span of months. However, devices for interfacing peripheral nervous system are still limited to bulky cuff electrodes with low channel counts. This has greatly limited our capability to take advantage of the massively interconnected peripheral nervous system in realizing accurate diagnostics and precision treatment of diseases.
Compared to the brain, peripheral nerves have their unique challenges such as its high curvature with large strains during movement, small diameter with highly packed fascicles, harsh surrounding environment with active immune responses. The Jiang lab is interested in developing new platforms for chronically stable and precision peripheral neural interfaces through the integration of material chemistry, device engineering, and medical applications. The students will be involved in the design and fabrication of soft three-dimensional electrode arrays for robust bidirectional interfaces with the nerve. In addition to learning electrophysiological recording, students will also be exposed to the field of biochemical and biophysical sensors for neurotransmitters, inflammatory biomarkers, temperature, and pH etc. Opportunities in testing the devices on live animal models will also be provided.
Tuning Solar Reflectivity with Responsive Materials
Jennifer Lukes (MEAM)
Email: jrlukes@seas.upenn.edu | Website
The idea of this project is to use computer simulations to design new materials whose solar reflectivity can be tuned by applying mechanical loading. Such materials will be beneficial for the development of responsive materials for passive thermal regulation of buildings. In this project, the student will analyze how mechanical strain affects the solar radiative properties of structural configuration of a composite material. The goal of the work is to identify which structural configurations produce the desired reflectivity at wavelengths that are strongly absorbed by building materials. This project is ideal for students who are more theoretically oriented. The student will learn about radiation heat transfer in composite materials.
Understanding Grasping and Manipulation using Force Sensors and IMUs
Prof. Michelle Johnson (Physical Medicine and Rehabilitation)
Email: johnmic@pennmedicine.upenn.edu | Website
Flexible tactile feedback for Therapy Robot: We have developed several therapy robot designed to help treat neurological disorders such as stroke and cerebral palsy. They are often designed for patients with upper extremity impairments, wherein one arm is impaired and the other one has higher degree of functionality. Reach and grasp is critical for patients after brain injury to relearn both unilateral or bilateral coordination for activities. Non-invasive flexible tactile sensors that are able to provide touch and grasp force feedback without obstructing subjects ability to grasp and manipulate objects are needed. We want to develop a set of sensorized objects that can integrate seamlessly with our robot therapy robot to facilitate relearning after brain injury.
Variable Capacitance Wireless Soil Sensing
Prof. Troy Olsson (ESE)
Email: rolsson@seas.upenn.edu | Website
The objective of this project is to characterize biodegradable soil moisture sensors, that vary in capacitance due to soil moisture, using passive wireless readout techniques. Soil properties can impact both crop growth and yield. Knowledge of soil conditions allows for intervention prior to the crops themselves expressing distress. Our goal is to create a passive sensor network for locally measuring soil properties throughout an agricultural field. This specific project will utilize a variable capacitance soil moisture sensor recently developed at Penn and will interface this capacitor with an antenna and tank circuit suitable for wireless operation beneath the soil surface. Wireless readout of the sensor will be performed over distance and at different depths to study the tradeoffs between sensor resolution and the wireless channel. Techniques allowing the operation of multiple sensors simultaneously within a small plot will also be explored.
Vision Based Yield Estimation
Prof. Camillo Jose Taylor (CIS)
Email: cjtaylor@central.cis.upenn.edu | Website
One of the most important challenges faced by farmers is the problem of accurately estimating the amount and quality of a crop prior to harvest. This is particularly challenging for the specialty crop industry, which encompasses most crop production outside of staples such as wheat, corn and soy-beans. One promising approach that has been developed recently involves developing algorithms that can automatically analyze sensor data such as imagery to count crops such as apples, oranges and mangoes. In our laboratory we have developed techniques for counting and localizing these kinds of crops using techniques based on deep learning. Our goal in this project is to extend these techniques to handle other crops such as strawberries and blueberries that have different structures and pose different kinds of challenges.
2023 Program Dates:
May 30th – August 4th
Application Deadline:
February 15, 2023